PWM Arayüzleri
T3-GEM-O1 kartta yer alan PWM arayüzleri aşağıdaki tabloda listelenmiştir.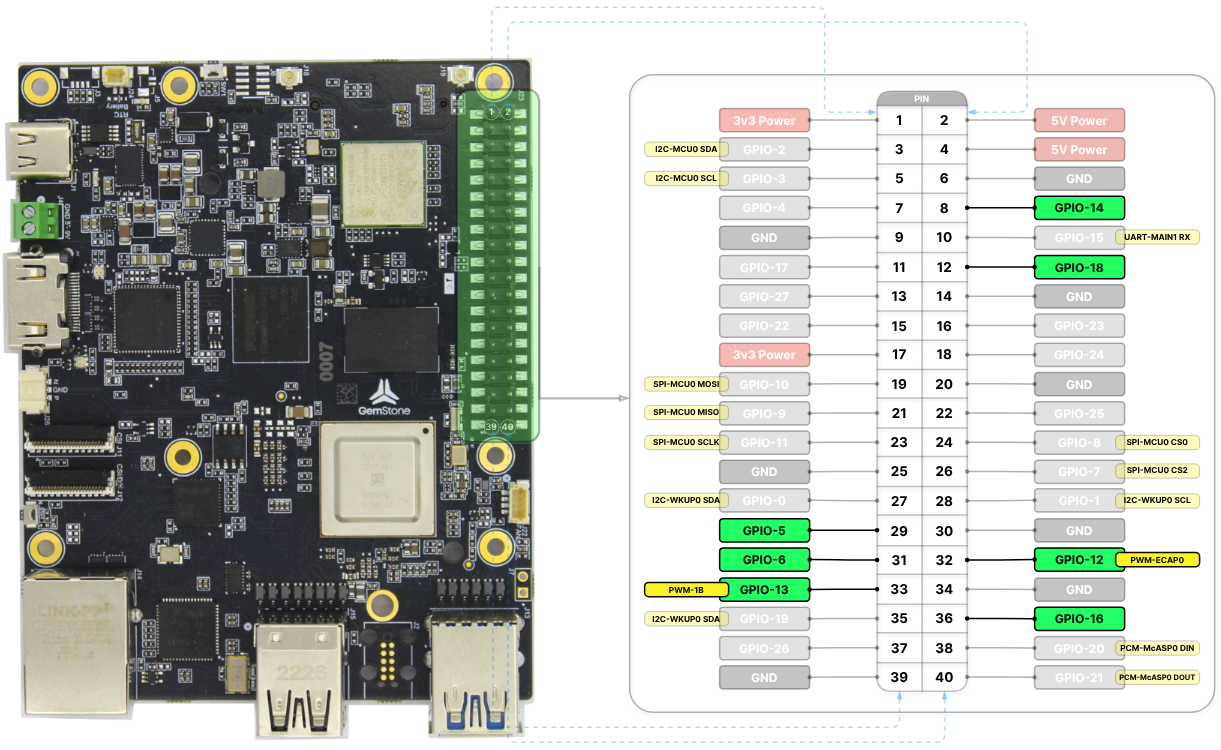
| GPIO | |||
|---|---|---|---|
| PWM-ECAP0 | pwmchip0/pwm0 | GPIO-12 | k3-am67a-t3-gem-o1-pwm-ecap0-gpio12.dtso |
| PWM-ECAP1 | pwmchip1/pwm0 | GPIO-16 | k3-am67a-t3-gem-o1-pwm-ecap1-gpio16.dtso |
| PWM-ECAP2 | pwmchip2/pwm0 | GPIO-18 | k3-am67a-t3-gem-o1-pwm-ecap2-gpio18.dtso |
| PWM-0A | pwmchip3/pwm0 | GPIO-5 | k3-am67a-t3-gem-o1-pwm-epwm0-gpio5.dtso |
| PWM-0B | pwmchip3/pwm1 | GPIO-14 | k3-am67a-t3-gem-o1-pwm-epwm0-gpio14.dtso |
| PWM-1A | pwmchip5/pwm0 | GPIO-6 | k3-am67a-t3-gem-o1-pwm-epwm1-gpio6.dtso |
| PWM-1B | pwmchip5/pwm1 | GPIO-13 | k3-am67a-t3-gem-o1-pwm-epwm1-gpio13.dtso |
| PWM-2A | pwmchip7/pwm0 | FAN header | k3-am67a-t3-gem-o1-gpio-fan.dtso |
PWM-0A ve PWM-0B birlikte aktif etmek için:
k3-am67a-t3-gem-o1-pwm-epwm0-gpio5-gpio14.dtsoPWM-1A ve PWM-1B birlikte aktif etmek için: k3-am67a-t3-gem-o1-pwm-epwm1-gpio6-gpio13.dtso/boot/uEnv.txt dosyasındaki overlays değişkenine
eklenmelidir. Overlay’ler hakkında detaylı bilgiye Device Tree bölümünden
erişilebilir.
Tüm overlay’ler aktif edildiğinde 1 tanesi FAN header’ından 7 tanesi 40-pin header’dan olmak üzere 8 ayrı PWM
arayüzü mevcuttur.
PWM Kullanımı
PWM çiplerine/sys/class/pwm dizininden erişilebilmektedir. Bir PWM cihazını kullanabilmek için öncesinde export
işlemi yapılmış olmalıdır. Örneğin yukarıdaki tablo incelendiğinde PWM-ECAP0 arayüzünün pwmchip0 çipinin pwm0
cihazına karşılık gelmekte olduğu görülmektedir. Aşağıdaki komut ile export yapıldıktan sonra
/sys/class/pwm/pwmchip0/pwm0 cihazı oluşur. echo 0 yazmamızın sebebi pwm0 yani 0 numaralı cihaz olmasıdır.
PWM-0B arayüzü kullanılmak isteniyorsa aşağıdaki komutta gösterildiği gibi pwmchip3 çipinin pwm1
cihazı aktif edilmelidir. echo 1 yazmamızın sebebi pwm1 yani 1 numaralı cihaz olmasıdır.
export işleminin ardından nanosaniye cinsinden period ve duty_cycle değişkenleri aşağıdaki örnekte gösterildiği
şekilde istenen değerlere ayarlanıp cihazın enable değişkenine 1 atandıktan sonra PWM çıktısı alınabilir.
enable değişkenine 0 atanabilir.
unexport işlemi yapılabilir. Bu işlem sonrasında cihaz
sistemden kaldırılacaktır. echo 0 yazmamızın sebebi pwm0 yani 0 numaralı cihaz olmasıdır.